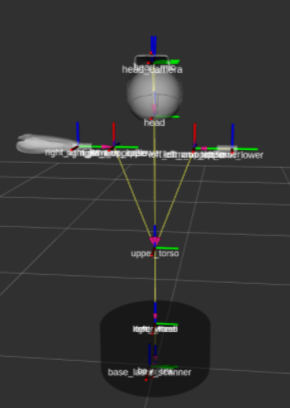
Joints
The following section will provide a high level overview of the joints of the robot and its kinematics. More detailed information can be found at the quori_description repository.

Joint Limits
- The base joints are all continuous revolute joints.
- The waist joint is revolute and has a range of
[-0.47,0.22], and is limited in both the low-level microcontroller and the quori_ros via the urdf. Mechanical stops exist to prevent the waist from going past these values. - Each arm has two degrees of freedom. The pitch and roll for each arm is limited by the urdf. The roll is further limited in the low-level microcontroller code. The pitch degree of freedom can theoretically be used continuously if the mid-level software is updated.
Joint orientation Information